Dans cette série d’articles, nous présentons les interfaces les plus populaires qui sont utilisées pour transmettre des données, et dans ce cas des images, entre les appareils qui les fournissent, c’est-à-dire les processeurs/contrôleurs ou les ordinateurs, et les appareils qui les présentent, c’est-à-dire les écrans ou les moniteurs.
Lorsque nous parlons d’interfaces, nous entendons les principes de connexion des appareils utilisés pour transmettre des données. Sans eux, il ne serait pas possible de présenter du contenu sur des supports d’information visuelle, tels que les écrans LCD-TFT.
Les interfaces peuvent être divisées en deux groupes :
- les solutions internes – c’est-à-dire celles dans lesquelles nous connectons directement des éléments d’un même appareil (généralement situés dans le même boîtier), c’est-à-dire :
contrôleur et affichage ; Parmi eux, m.in.
interfaces pour le transfert d’images uniquement (RGB, LVDS, eDP, MIPI DSI et Vx1) et pour le transfert de données diverses, y compris les images (RS232, I2C, SPI ou solutions parallèles 8 et 16 bits) ; - les solutions externes – c’est-à-dire celles dans lesquelles nous combinons deux appareils distincts, par exemple un ordinateur et un moniteur ; De telles solutions nécessitent des câbles ; parmi eux, m.in : HDMI, DVI, VGA et DP.
Les interfaces peuvent également être divisées en fonction du type de transmission de données, en distinguant : les interfaces parallèles, dans lesquelles des informations de 1 bit sont transmises sur de nombreuses lignes, et les interfaces série, dans lesquelles des informations consécutives de 1 bit sont envoyées sur une seule ligne.
Dans cet article, nous nous concentrerons principalement sur les interfaces RS232, I, 2, C et SPI. Pour en savoir plus sur les interfaces RGB, LVDS, eDP, MIPI DSI et Vx1, consultez l’article « Vue d’ensemble des interfaces populaires pour la transmission d’images – partie I ». 1« .
RS232 (Norme recommandée 232)
L’interface RS232 est une solution dont l’histoire remonte aux années 60 du XXe siècle. – il a été développé par l’EIA (Electronic Industries Association) pour combiner téléscripteurs et modems. Au cours des décennies suivantes, il a servi d’interface de base pour connecter divers accessoires aux ordinateurs, tels que les imprimantes ou les scanners. Actuellement, il s’agit d’une solution de niche qui est principalement utilisée dans les équipements spécialisés, par exemple dans l’industrie.
En ce qui concerne l’interface RS232, les câbles avec des fiches caractéristiques peuvent être associés à des câbles avec des prises caractéristiques. Cependant, dans le contexte de cet article, nous nous intéressons aux solutions embarquées de circuits imprimés qui sont utilisées pour connecter divers composants au sein d’un seul appareil.
L’interface RS232 est une solution série utilisée pour connecter des DTE (Data Terminal Equipment) et des DCE (Data Communication Equipment), où une seule ligne ne peut être utilisée que pour connecter deux appareils, c’est-à-dire : un DTE et un DCE. La communication peut se faire à la fois de manière unidirectionnelle (simplexe) et bidirectionnelle (duplex intégral) dans deux variantes de transmission de données, à savoir : asynchrone. Il existe plusieurs types de lignes dans l’interface RS232, notamment :
- lignes de données (TxD – données transmises et RxD – données reçues),
- Lignes de contrôle (m.in.
DSR (Data Set Ready) – état de préparation de l’ETCD à coopérer avec l’ETTD ou le DTR (Data Terminal Ready) – état de préparation de l’ETTD à coopérer avec l’ED (les lignes DSR et DTR sont actives pendant toute la durée de la connexion) ; - Lignes de masse (m.in.
GND (sol) ou PG (motif de protection)).
En fonction des exigences de l’application, il est possible d’utiliser des sous-ensembles de lignes avec différents niveaux de complexité. L’une des variantes est m.in. solutions à trois lignes, c’est-à-dire TxD (pour la transmission des données), RxD (pour la réception des données) et GND (masse).
L’interface RS232 est relativement résistante aux interférences électromagnétiques, les données étant transmises à des vitesses allant généralement jusqu’à 9600 ou 115200 bps (à l’exception de certaines variantes synchrones, où des vitesses allant jusqu’à 1 Mbps peuvent être atteintes). Dans le même temps, il convient de rappeler qu’il s’agit de solutions dans lesquelles il existe des fluctuations de tension importantes.
Modèle maître/esclave
Avant d’aborder les deux interfaces suivantes, i.e. I2C et SPI, il convient de se référer au modèle « maître/esclave », dans lequel il existe des appareils maîtres qui gèrent des appareils esclaves. Dans de tels modèles, l’appareil maître démarre toujours la communication en générant un signal d’horloge, au cours duquel les données sont envoyées ou reçues.
Les termes « maître » et « esclave » utilisés dans ce modèle sont controversés en raison de leur association avec l’esclavage. En 2004. Le Global Language Monitor (GLM) les a considérés comme l’exemple le plus flagrant d’incorrection politique. Actuellement, ils sont de plus en plus souvent remplacés par d’autres termes, par ex. « primaire » et « réplique », utilisés m.in. dans les frameworks Django et Drupal. Ils sont également utilisés par m.in. Microsoft.
I2C (circuit inter-intégré)
L’interface I2C, autrement appelée IIC, est une solution de connexion de circuits intégrés (Inter-Integrated Circuit peut être traduit par « un intermédiaire entre circuits intégrés »). Il a été développé au début des années 80. XXe siècle. par Phillips.
L’interface I2C est une solution série dans laquelle la communication s’effectue de manière bidirectionnelle via deux lignes : SDA (Serial Data Line) et SCL (Serial Clock Line). Il s’agit d’une technologie fonctionnant dans l’architecture « maître/esclave » avec la possibilité d’introduire n’importe quel nombre de maîtres gérant des esclaves ; C’est donc ce qu’on appelle Bus multimaître. L’information est envoyée sous la forme de « paquets » à un octet (c’est-à-dire à huit bits). Chaque transmission a son propre début (signal START/bit de début) et sa propre fin (signal STOP/bit d’arrêt). Entre les deux, l’appareil maître transmet l’adresse de 7 bits, suivie des bits de lecture/écriture et des données correspondantes à l’appareil cible. Après la transmission de l’adresse, le périphérique esclave transmet un bit supplémentaire, c’est-à-dire ACK ou NACK, qui informe sur le flux de données correct/incorrect (et protège contre la perte de données incontrôlée). Le même bit est également envoyé lorsque des données sont reçues de l’appareil maître. L’interface I2C est contrôlée par cinq modes de synchronisation avec différentes vitesses de transfert de données :
- Mode standard – vitesse jusqu’à 100 kbit/s,
- Mode rapide – vitesse jusqu’à 400 kbit/s,
- Fast Mode Plus – vitesse jusqu’à 1 Mbit/s,
- Mode haute vitesse – vitesse jusqu’à 3,4 Mbit/s,
- Mode ultra-rapide – vitesses jusqu’à 5 Mbit/s.
Parfois, on distingue également le mode Turbo avec une vitesse allant jusqu’à 1,4 Mbit/s.
Dans l’interfaceI2C, chaque appareil esclave, c’est-à-dire un seul circuit intégré, reçoit sa propre adresse unique ; Au total, jusqu’à 128 adresses peuvent être prises en charge dans un bus, soit jusqu’à 128 circuits intégrés individuels, mais il convient de rappeler que le taux de transfert de données est limité à 5 Mbit/s au maximum. Dans certaines applications, l’interface I2C peut ne pas fonctionner en raison de sa faible immunité aux interférences électromagnétiques à haute impédance complexe.
L’interface I2C est utilisée m.in. dans les écrans OLED. Vous les trouverez dans l’offre d’Unisystem en variantes graphiques et en caractères.
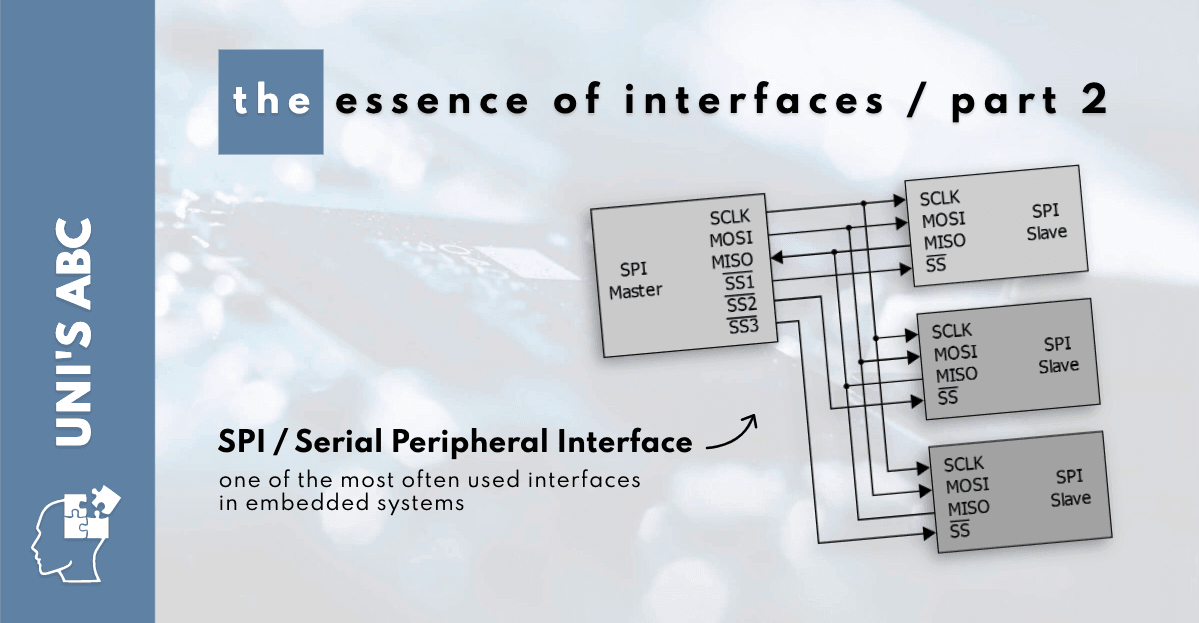
SPI (Serial Peripheral Interface)
L’interface SPI est l’une des solutions les plus couramment utilisées pour la communication entre les systèmes de microprocesseurs et les systèmes périphériques, tels que les ADC/DAC, les EEPROM, les cartes MMC/SD, etc. Son histoire remonte aux années 80. XXe siècle. – puis il a été lancé sur le marché par Motorola.
L’interface SPI est une solution série dans laquelle la communication s’effectue de manière bidirectionnelle ; Il est également basé sur le modèle « maître/esclave », mais il ne s’agit pas d’un bus multi-maître – dans cette technologie, un seul appareil maître est généralement utilisé, auquel plusieurs esclaves sont connectés. Quatre lignes sont utilisées pour transmettre l’information :
- SCLK (Serial Clock) – un signal d’horloge,
- MOSI (Master Output Slave Input) – une ligne qui transmet des données à un appareil esclave,
- MISO (Master Input Slave Output) – une ligne qui transmet des données à un appareil maître,
- SS (Slave Select) ou CS (Chip Select) – une ligne utilisée pour sélectionner un périphérique esclave.
Dans SPI, le maître configure l’horloge puis indique l’esclave avec lequel l’information sera échangée ; pour activer le système périphérique approprié, la ligne SS ou CS est utilisée. Les données sont transmises via les lignes MOSI (de l’ordinateur de poche à l’esclave) et MISO (de l’esclave au maître). La communication est basée sur des registres à décalage constitués de tongs de type D, au nombre de huit au total (numérotées de 0 à 7) ; Chacun d’eux stocke des informations d’un bit – 1 octet, c’est-à-dire 8 bits de données, est transmis pendant huit cycles d’horloge. En même temps, il s’agit de solutions flexibles – il n’y a pas de restrictions 8 bits, ce qui permet une liberté en termes de m.in. la taille ou le contenu du message.
L’interface SPI est appréciée pour ses performances : la vitesse de transfert de données atteinte peut atteindre 37,5 Mb/s. Malheureusement, cette technologie n’utilise aucun protocole de vérification d’erreurs (tel que les bits ACK et NACK dansI2C), ce qui peut entraîner une perte potentielle de données. De plus, dans certaines applications, l’interface SPI peut ne pas fonctionner en raison de sa faible résistance aux interférences électromagnétiques à haute impédance complexe (ajoutons que – en raison de la fréquence de fonctionnement de l’interface SPI comptée en centaines de MHz – elle est encore plus gênante que dans le cas de l’interfaceI2C).
L’interface SPI est principalement utilisée dans les solutions ne dépassant pas 7 pouces, tant dans la technologie LCD que dans la technologie OLED, ainsi que dans l’EPD. Vous les trouverez également dans l’offre d’Unisystem – vérifiez leur disponibilité pour les OLED et EPD à écran LCD, graphiques et en caractères.
Dans le contexte des interfaces en question, il convient également de mentionner les solutions parallèles à 8 et 16 bits, qui sont toujours utilisées m.in. dans les écrans OLED. Il s’agit d’interfaces dans lesquelles les données sont envoyées simultanément dans deux directions. Il peut s’agir d’informations de 4, 8, 16 ou 24 bits, chaque bit nécessitant une ligne distincte (des lignes supplémentaires peuvent également être utilisées en même temps, par exemple pour le signal d’horloge), ce qui se traduit par un nombre croissant de fils nécessaires pour se connecter au microcontrôleur.
L’utilisation de ce type d’interfaces est encouragée par une intégration simple dans le système, ainsi que par le débit de données (cela peut être imaginé en comparant une interface parallèle et série, par exemple 8 bits, en supposant que les deux fonctionnent à la même fréquence d’horloge ; dans une interface parallèle, les données sont envoyées simultanément, 8 bits à la fois, tandis que dans une interface série, les données sont envoyées séquentiellement, 1 bit à la fois – nous pouvons deviner, dans laquelle l’information sera transmise huit fois plus vite ;-)).
Vous vous demandez quelle interface conviendra le mieux à votre application ? Contactez-nous – ensemble, nous trouverons sûrement la solution optimale.